1. Camera calibration 업데이트 확인
이제 이전에 작업했던 calibration 을 적용하여 새로운 bag 파일을 생성한다.
rosrun lidar_camera_calibration update_camera_info.py <original_file.bag> <calibration_file.yaml>
명령어는 다음과 같은데 이때 update_camera_info.py 에서 수정할 부분이 몇가지 있다.
#!/usr/bin/env python3.8 # 1. 여긴 3.8 로 지정해줘야 한다.
# -*- coding: utf-8 -*-
'''
Author : Heethesh Vhavle
Email : heethesh@cmu.edu
Version : 1.0.1
Date : Jan 18, 2019
Description:
Script to update the camera calibration data into the ROSBAG file
Ensure that this file has executable permissions
Example Usage:
$ rosrun lidar_camera_calibration update_camera_info.py rosbag.bag calibration.yaml
Notes:
Make sure this file has executable permissions:
$ chmod +x update_camera_info.py
'''
# Python 2/3 compatibility
from __future__ import print_function
# Built-in modules
import os
import sys
import yaml
# ROS modules
PKG = 'lidar_camera_calibration'
import roslib; roslib.load_manifest(PKG)
import rosbag
import rospy
def load_calibration_data(filename):
# Open calibration file
with open(filename, 'r') as stream:
try:
#calibration = yaml.load(stream)
calibration = yaml.load(stream, Loader=yaml.FullLoader) # 2. 뒤에 Loder 부분 추가.
except yaml.YAMLError as exc:
rospy.logerr(exc)
sys.exit(1)
return calibration
if __name__ == '__main__':
# Get parameters when starting node from a launch file.
if len(sys.argv) < 1:
BAG_FILE = rospy.get_param('filename')
CALIB_FILE = rospy.get_param('calib_data')
CAMERA_INFO = rospy.get_param('camera_info')
# Get parameters as arguments
else:
BAG_FILE = sys.argv[1]
CALIB_FILE = sys.argv[2]
CAMERA_INFO = '/usb_cam/camera_info' # 3. 여긴 본인 camera_info 형식에 맞게 수정
# Load ROSBAG file
rospy.loginfo('Bag Filename: %s', BAG_FILE)
bag = rosbag.Bag(BAG_FILE, 'r')
# Output file
folder = os.path.dirname(BAG_FILE)
output_name = os.path.splitext(os.path.basename(BAG_FILE))[0] + '_updated.bag'
OUTPUT_FILE = os.path.join(folder, output_name)
os.mknod(OUTPUT_FILE)
output = rosbag.Bag(OUTPUT_FILE, 'w')
# Load calibration data
calibration = load_calibration_data(CALIB_FILE)
# Update calibration data
rospy.loginfo('Updating %s data...' % CAMERA_INFO)
for topic, msg, t in bag.read_messages():
if topic == CAMERA_INFO:
msg.D = calibration['distortion_coefficients']['data']
msg.K = calibration['camera_matrix']['data']
msg.R = calibration['rectification_matrix']['data']
msg.P = calibration['projection_matrix']['data']
output.write(topic, msg, msg.header.stamp if msg._has_header else t)
rospy.loginfo('Done')
# Close bag file
bag.close()
output.close()
일단 3가지 수정사항이 있다.
먼저 맨 위에를 python3.8 로 수정하였다. 본인 python 환경에 따라 수정해주면 된다.
다음으로 calibration = yaml.load(stream, Loader=yaml.FullLoader) 뒤에 Loader 부분을 추가해줬다. 이를 지정해주지 않으면
E.YAMLLoadWarning 오류가 뜰것이다. 안전한 로더를 명시적으로 지정해줘야 한다.
마지막으로 CAMERA_INFO = '/usb_cam/camera_info' 로 usb_cam 으로 수정해주었다. 이 또한 본인의 camera_info 에 맞게 수정해주면 된다.
이제 다시
rosrun lidar_camera_calibration update_camera_info.py /본인카메라 bag파일 경로/카메라.bag /본인 calibration한 yaml파일경로/ost.yaml
경로랑 파일명은 본인걸로 수정해주면,
이렇게 update 파일이 추가된다.
2. calibration bag 파일 확인
이제 display_camera_calibration.launch 를 수정할 차례이다.
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="camera" default="/usb_cam" /> <!--본인 카메라 topic -->
<!-- Play rosbag record -->
<include file="$(find lidar_camera_calibration)/launch/play_rosbag.launch">
<arg name="bagfile" value="camera_data_updated.bag" />
</include>
<!-- Nodelet manager for this pipeline -->
<node
pkg="nodelet"
type="nodelet"
args="manager"
name="lidar_camera_manager"
output="screen" />
<node
pkg="image_proc"
type="image_proc"
name="image_proc_node1" />
<!-- Run image_proc/rectify nodelet -->
<node
pkg="nodelet"
type="nodelet"
name="rectify_color"
args="load image_proc/rectify lidar_camera_manager --no-bond" >
<!-- Remap input topics -->
<remap from="image_mono" to="$(arg camera)/image_raw" /> <!--본인 카메라 topic image_raw-->
<remap from="camera_info" to="$(arg camera)/camera_info" /> <!--본인 카메라 topic camera_info-->
<!-- Remap output topics -->
<remap from="image_rect" to="$(arg camera)/image_raw" /> <!--본인 카메라 topic image_raw-->
</node>
<!-- Run image view to display the unrectified image -->
<node
name="unrectified"
pkg="image_view"
type="image_view"
respawn="false"
output="screen">
<!-- Remap input topics -->
<remap from="image" to="$(arg camera)/image_raw" /> <!--본인 카메라 topic image_raw-->
</node>
<!-- Run image view to display the rectified image -->
<node
name="rectified"
pkg="image_view"
type="image_view"
respawn="false"
output="screen">
<!-- Remap input topics -->
<remap from="image" to="$(arg camera)/image_raw" /> <!--본인 카메라 topic image_raw-->
</node>
</launch>
위에 주석처리한 부분을 본인 카메라 토픽으로 수정하고 다음과 같은 명령어를 실행하면
roslaunch lidar_camera_calibration display_camera_calibration.launch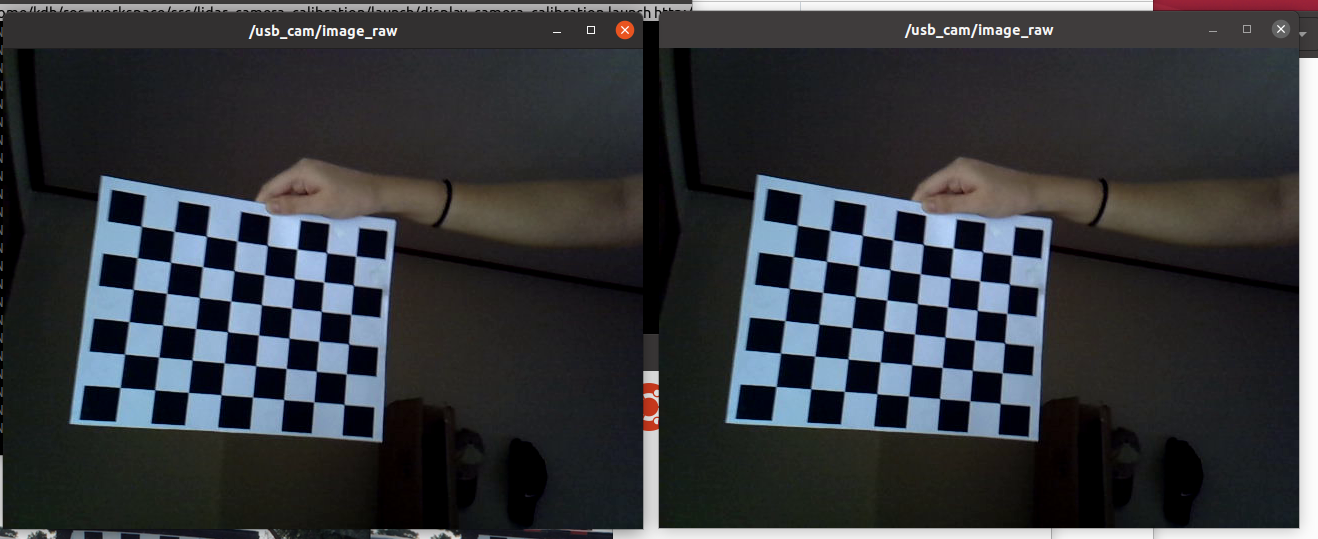
이렇게 오른쪽처럼 체커보드가 펴진 모습을 확인할 수 있다.
'Vision_' 카테고리의 다른 글
| Opencv_StereoBM 을 사용한 stereo matching (0) | 2024.08.29 |
|---|---|
| Camera_Lidar Fusion_2_(Lidar bag파일 녹화, Camera calibration, os_cloud_node/points) (0) | 2024.02.25 |
| Camera_Lidar Fusion_1_(카메라 bag파일 녹화,/usb_cam/image_raw,/usb_cam/camera_info) (0) | 2024.02.24 |
| Ubuntu_20.04 usb_cam 사용하기 (초기세팅) (0) | 2024.02.16 |
| Vision_용어정리 (0) | 2024.01.18 |